�����W���ɹ����Ƈ������_�������z�y���ڙC���ˡ�
2012-12-03 20:48:21
����2�գ�ӛ�ߏ��Ͼ�������W�@Ϥ���Ͼ�������W��WӋ��C�WԺ�����W����ٻ������˅��c�����˞�����ʴ_���}“�����z�y���ڙC����”���@Ҳ�LJ������_“�����z�y���ڙC����”��
����
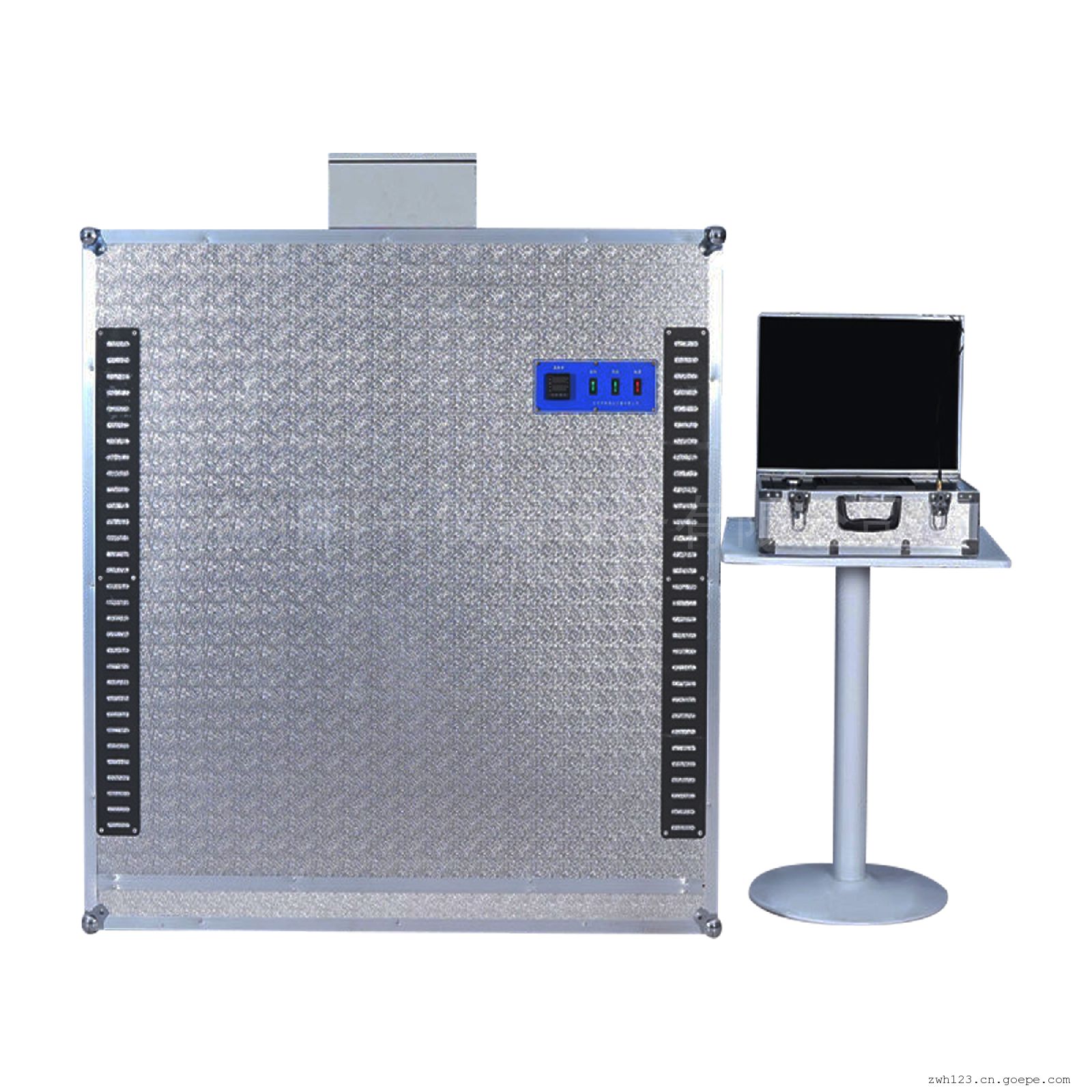
�����@��һ���L������20�������ҵ�“��”�һ�w��Ҳ����1.5���������һ���L�L��“���|��”�������Ă�݆�ӣ�ͨ�^�o�������O�䣬��ÿ���8���ٶ��ڶ��������ĸ������������У������{Ƥ���˂�180�ȴ��D��һ���ɴ��@�����Ę���g�����@���˟o���漰�IJ�λ���^�m�����ؼ���Ѳ�顣
����
�����@���������p�ɵ��^�̿ɲ����Σ��nj�“���|��”�ѽ������M�^���M�����ջ���������g�ˆT�tͨ�^����O���O�䣬�������������������������Dz������_�Ę���Пo�ѿp���Ɠp���ϻ������ۡ����g�ȬF��һĿ��Ȼ�����������꣬һ�����������ʵ�Ӱ���Y�ϼ��r�����˼��g�ˆT���еăx���ϣ����������ѿpֻ��0.5mm�ļ�С�ѿp���ܱ��ʴ_����������ע�ʴ_λ�ã��ṩ�o�����S���T��
����
�����Ͼ�������WӋ��C�WԺ�����ڄ����ǘ������ڙC���˵�ָ���ώ�������B���ڇ��ȣ�������ȫ�����ܵ���ҕ���������������FһЩ�C��׃�������Ɠp���Ѽy���ϻ��Ȳ������@Щ���^�����z����y�������˹��������@�Ӳ��H�M�r�M��������Ҳ�����˙z���ˆT��������ȫ�[����б���������ĸ������Լ��߶��������^�z�y���ǂ����y�c���Ԙ���֧���ęz��������������c���_ñ�g�ľ��xС�����������ܵ��_���o���ṩȫ��λ�z�顣�����@��С�C���ˣ����`���M��MС�Ŀ��g���м��^��֧������r���@�ӵęz�鲻�Hʹ����Ч����ߎ�ʮ�������ʡ�˙z�y�r�g���M�ã��p���˷�·�ĕr�g��߀ʹ��ȫ�L�U����½��������F����ҕ�l����Ƭ�������Ϣ�������vʷ�����͌��ҷ�����ԭʼ�������@������һ���̶��ϱ������“����”�¼��İl����
����
���������f���e�������^С�����܅sһ�c�����٣��������ܷ������b�á��ƄәC����ͨӍ���ƺͲ����z�y�Ă���ϵ�y�������ܷ��������P�I���g��ͨ�^�����b���b�ðl�͵�ָ�С�һ�ȵ��x�ı��w�������D���ų��ܷ�ǻ�Ě��w�����Ĵ�≺�������ܷ�ǻ�ȉ���������ܾo�o���ژ��������ϡ�����“���|��”�����Dz����z�yϵ�y�����ܕr��עҕ�ь����������κ��Н���Σ�U�ĵط�����ͨ�^�o���W�j���z�y�D���ݔ�����棬�o�����ˆT�ṩ��*�ֵ��Y�ϡ�
����
�������˽⣬�@���ĿҲ���ڽ��Kʡ���c�Ƽ�֧��Ӌ�����Y���£���������Ӌ��C�WԺ�c�������ٹ�·��˾�������Ƹܘ����ȱ�ݙz�y�C���˵�һ���֡�